문제의 책임소재보다 함께 해결책을 모색하는 곳 Contributor 이진한 2016년 입사, 컴퓨터공학(석사) 네이버랩, Mapping & Localization

누구나 자동 로봇이 도로상을 익숙하고 자연스럽게 움직이는 세상을 그렸던 적이 있겠지요.나도 그렇고.멀지 않은 미래에는 스스로 이동할 공간이 정보나 서비스, 상품 등을 담고, 지금까지와 다른 새로운 연결을 만들어 갑니다.그리고 이런 세상은 네이버 랩이 발표한 미래상”A-CITYAutonomous City”과도 맥락을 같이 합니다.나도 그 세계를 여는 데 함께 하고 싶다는 열망을 가지고 있습니다.그래서 나는 네이버에서 “도로 위를 자동차 운전 로봇을 연구”, 개발자로서 지금도 열심히 달리고 있습니다.

간단한 소개처럼 제가 하는 일의 대부분은 자율주행과 관련하여 팀에서 진행하는 프로젝트의 목표에 대해 고민하고 개발 방향과 범위를 정하는 것입니다. 여기서는 이 분야에 관심 있는 많은 분들(라고 쓰고 예비 네이버랩스 사람이라고 읽기)을 위해 제가 네이버랩스에서 자율주행을 연구하게 된 계기와 저희 팀에서 하는 일, 자율주행 SW 기술/시스템 개발에 대해 말씀드리고자 합니다.
인기글




컴퓨터 공학 전공자가 로보틱스 전문가로 전향한 이유

과거를 돌이켜보면 나는 큰 목표로 자동 운전의 개발을 시작하고는 없었을 거예요.전공을 컴퓨터 과학에서 시작했는데 석사 1년차에 우연히 로봇의 수업을 받고 최초로 로봇을 만났습니다.소니에서 만든 아이보라는 강아지 로봇이었어요.수업에서는 아이보가 공을 찾고 공을 따라가는 주어진 SW를 수정하는 정도의 난이도의 과제를 주었지만, 지금 생각하면 그리 대단한 일이 아닌 과제 같지만 SW알고리즘에서 로봇을 행동을 바꿀 수 있는 점이 당시의 나에게 큰 매력이었습니다.심지어 이 로봇을 만나서, 저는 진로를 Robotics로 바꾸게 되었습니다.우연의 경험이 만든 운명인 것입니다.

출처 : Sony AIBO

진로를 바꾸면서 만난 연구실에서는 DARPA가 주관하는 LAGR프로젝트에 참가했습니다.당시 지도 교수가 “직접 한번 하실래요?”와 프로젝트 참여를 독려하세요 저는 Outdoor용 Navigation알고리즘의 개발을 시작했으며, 자동 운전을 개시하게 되었습니다.그때가 2005년도이니까 15년 넘었군요.(참고로, DARPA Grand Challenge가 2004년도에 있어서요, 이제 보니 자동 운전 분야에 상당히 빨리 했던 것 같아요.)

●●: DARPALAGR 로봇
(영화로 보면 쉽지만…자율주행 그게 어려운 일인가요?)

먼저 이미 잘 아시겠지만 다시 한번 자율주행 기술에 대해 설명해보겠습니다.

요컨대 자동 운전 기술은 로봇이나 차량 같은 플랫폼이 스스로 이동하도록 하기 위해서 필요한 모든 기술의 컬렉션입니다.매핑·측위·인지·예측·계획 등 다양한 분야의 기술이 모두 해결되어야 할 마치 종합 예술 같습니다.이들 기술을 나눠서 보면 플랫폼의 위치를 순간 추정하는 기술 Localization플랫폼의 이동 경로 주변의 이동과 정적인 장애물을 위치와 속도를 추정하는 기술 Perception주변 이동의 이동 경로를 예측하는 기술 Prediction, 주어진 목적지까지 안전하게 이동할 수 있도록 플랫폼의 행동을 결정하는 최적의 경로를 생성하는 기술 Decision Making&Planning, 플랫폼이 주어진 경로에 잘 따르도록 하는 제어 기술 Control로 나뉘어 각 기술의 신뢰성과 정확도를 높이기 위해서 정보가 제공되고 있습니다.
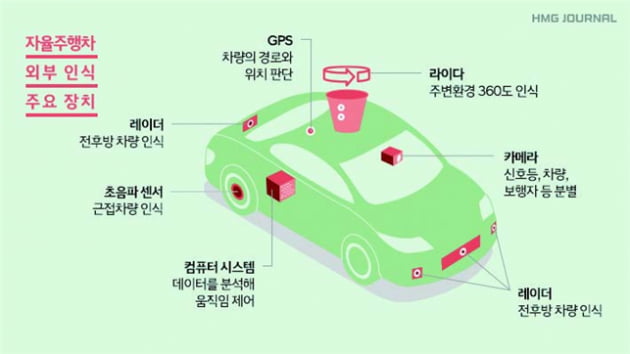
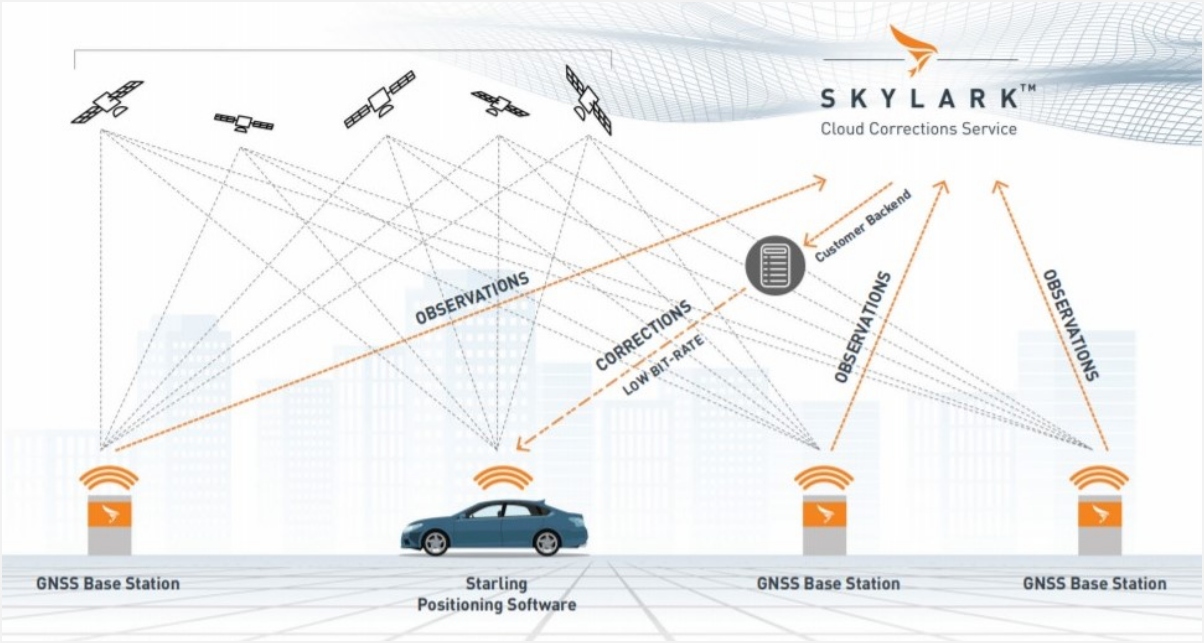
그리고 자동 운전 기술은 다양한 종류의 다양한 센서(카메라, 라이더, Radar, GPS Receiver, Wheel Encoder, IMU등)에게서 얻은 데이터를 기반으로 작동하기 때문에, 센서 Intrinsic/Extrinsic Calibration알고리즘 및 시스템을 갖추는 것은 중요합니다.그리고 때로는 당연히 주어질 거 플랫폼의 센서/제어/배터리 등을 관리하는 시스템을 개발하는 것도 필요합니다.그 밖에도 개발된 각 기술을 모듈 또는 시스템 단위로 테스트하고 검증하는 것(Testing&Validation)기술을 개발하는 것만큼 중요합니다.플랫폼을 실제 도로 환경에서 운용하기 위해서는 궁극적으로는 실제 도로 환경에서 플랫폼을 테스트하고 검증하는 것이 필요한데 도로에서 조우할 가능성 있는 다양한 환경 및 주행 상황을 사전에 시뮬레이션에서 테스트하며 문제가 없음을 확인하는 과정이 필요합니다.자동 운전에 필요한 것을 하나하나 나란히 하고 보면 정말 많군요.제대로 기술을 개발하기 위해서는 모두 중요한 것인데 하나도 필수죠.재미있게도 우리는 대부분의 기술을 개발하고 있다는 것입니다.(이것이 얼마나 중요한지는 앞의 일입니다.피. 샤르에서 소개되었으므로 따로 설명은 하지 않습니다!)[네피셜] 로봇이 보는 세상은 어떤 모습일까 [편집자 주]연재칼럼 [네피셜]은 매일 수많은 유저들의 목소리를 들으며 새로움과 글로벌에 도전하는 네…blog.naver.com그래서 중요한 것은 ‘이’의 야간 자율주행을 위한 센서이며 브레인, HD맵HD맵은 한마디로 자동 운전 플랫폼의 머리 또는 이제1개의 센서입니다.좀 더 자세히 알아볼까요?도로에서 이동하는 자동 운전 플랫폼은 현재 위치에서 이동하고 싶은 장소까지 가차로 단위의 경로를 만들기 위해서 도로에 관한 정보가 필요합니다.이 정보는 차선 단위의 모양과 연결성, 사거리, 신호기 등의 종합 정보에서 일반 네비게이션으로 길을 찾을 때에 사용 도로 정보보다 훨씬 더 자세히 정밀입니다.자동 운전하는 머신의 경우는, 남들의 인지/행동 능력을 갖고 있지 않아 훨씬 많은 상세한 정보가 필요합니다.이 정보의 정확도가 자동 운전의 품질을 결정합니다.HD맵이 도로 자동 운전 연구에 필수적인 이유입니다.HD맵은 만드는 회사에 의해서 데이터의 형태는 다르지만 공통점은 안에는 Localization, Decision Making&Planning, Perception등으로 필요한 정보를 담고 있습니다.네이버 랩 HD맵은 아래 그림처럼 도로 형태 정보와 접속성 정보를 포함한 Road Layout도로의 정적 장애물 정보를 포함한 Point Cloud Feature와 카메라 기반의 Localization을 위한 Visual Feature로 나누어집니다.네이버 랩은 자동 운전 연구 개시 시점에서 HD맵 솔루션을 함께 연구했습니다.그 결과가 하이브리드 HD매핑입니다.항공 사진과 MMS데이터를 결합하여 고 정밀 지도를 만드는 독창적인 기술입니다.항공 사진 매핑 기술을 이용하고 Road Layout정보를 더 빠르게 딸 수 있는 정확한 위치 정보를 가진 항공 사진과 MMS차량의 센서 데이터를 Registration자리가 매우 정확한 Feature을 생성합니다.도심 단위의 대규모 영역의 HD맵을 빠르고 정확하게 만드는 데 효과적인 방법입니다.네이버랩스 ‘자율주행 개발자’ 꼭 따라오는 질문 2개네이버 랩에서 목표로 하는 자동 운전 기술은?네이버 랩에서 목표로 하는 자동 운전의 수준을 SAE Level에서 가르치고 달라는 질문을 자주 받습니다.이 Level의 의미는 기술에 대해서 한마디로 정의할 수는 없지만 어느 레벨을 목표로 하고 있는지 확인하기 쉬운 지표입니다.일반 자동차로 서포트하는 ADAS기능은 SAE Level 2에 해당합니다.그리고 도심 주행을 하려면 Level 4정도의 기술을 지향해야 합니다.우리 팀에서는 현재”Level 5자동 운전 SW개발”프로젝트를 진행하고 있습니다.Level 5는 자동 운전의 SAE Level의 마지막 단계에서 사람의 개입 없이 모든 문제를 처리할 수 있는 기술 단계입니다.우리가 Level 5를 목표로 하고 있는 것은 완벽하게 Level 4에 이미 도달했다는 의미가 아닙니다.우리가 개발하고 있는 무인 로봇 플랫폼 ALT에 필요한 사람의 개입을 요구하지 않는 자동 운전 기술을 개발하겠다는 의지의 표현이며 마음가짐입니다.자동 운전하는 논문을 쓰고 연구도 많이 합니까?자동 운전을 업으로 하고 있는 개발자에게 다행인지 불행인지, 자동 운전의 문제는 아직 해결되지 않았습니다.당면의 자동 운전 문제를 풀어 보면 이미 해결되지 해결책이 없어 관련 최신 논문을 읽거나 스스로 연구를 해야 하는 경우가 아주 잘 있습니다.그 때문인지 여전히 컴퓨터 비전 머신 러닝, 로봇 공학 학회에서 자동 운전에 관한 많은 논문이 게재되고 있는 상황입니다.이런 상황에서 우리는 연구를 하기 때문에 문제를 만들 필요가 없을 정도로 이미 연구가 필요한 많은 현실적인 문제를 가지고 있습니다.그래서 나는 자동 운전 팀에서 하는 모든 것이 연구라고 생각합니다.학교에 있을 때 만큼 논문을 많이 쓰는 것은 없지만, 연구와 개발을 구분하지 않고 즐겁게 일하고 있습니다.차이를 존중하고 책임 소재보다 해결책을 함께 찾아 네이버 랩 문화제가 네이버 랩에 입사해서 정말 좋다고 느낀 점이 몇가지 있습니다.그 중 하나가 차이를 인정하고 서로를 존중하는 문화입니다.어떤 문제가 주어졌을 때 문제를 푸는 방법이 1개 이상 있는 경우가 대부분입니다.우리 팀은 정말 다양한 전공과 배경의 개발자가 모이고 있기 때문에 같은 문제에 대한 시각이 다른 푸는 해결책도 다시 크게 다릅니다.이 차이에 어떻게 접하게 되느냐가 중요하다고 생각합니다.과거의 경험을 보면 차이에 틀림 없이 대하고 사람들 사이에 불협화음이 생긴 것 같습니다.예전에는 차이를 인정하는 것에 익숙하지 않던 나도 차이를 인정하는 문화 속에서 생각한 것 없이 좋은 해결책이 나오기를 경험했습니다.그 경험이 하나하나 쌓여서 동료에 대한 신뢰를 쌓는 토대가 될 것 같아요.한가지 좋은 점은 열정적으로 책임 지는 문화입니다.아까 이야기한 것처럼, 자동 운전에 많은 크고 작은 문제가 존재하고, 이들 문제는 꼬이고 있습니다.문제를 각자 풀어 보면 문제가 만나는 접점에서 문제가 생기면 누가 풀어야 할지 애매한 상황이 존재하는 것도 있습니다.이런 상황에서 문제가 잘 해결되지 않으면 상황은 더욱 어려워질 가능성이 있습니다.내가 랏프스의 동료에게 감사하는 점은 이런 상황이 되면 모두가 풀지 못하는 문제를 해결하기 위해서 집중하고 책임 소재를 파악하지 않는다는 점입니다.프로젝트를 몇번이나 진행하면서 함께 하는 동료들이 책임감을 가지고 자신이 풀어야 하는 문제를 정의하고 풀어 가는 모습을 많이 보았습니다.이렇게 좋은 동료들과 함께 할 기회를 얻은 게 행운이라고 자주 생각합니다.쓰다가 분량 조절에 실패한, 그래도 마무리는즐겁게 제가 하고 있는 것들, 그리고 네이버랩이 하고 있는 것들에 대해서 설명을 드렸는데 정작 자율주행을 현실화하기 위해서는 아직 해결해야 할 문제들도 많아 아직 갈 길이 멉니다. 좋은 분들과 함께하니 가는 길이 꽤 즐겁다는 말로 이 글을 마무리하시고 네이버랩 채용에 많은 관심 가져주시길 부탁드립니다.네이버 LABS Career 네이버랩 채용정보 및 조직문화 recruit.naverlabs.com[네피셜] 시리즈는 작성자 개인이 네이버에서 일하면서 느끼는 경험과 이에 대한 생각을 정리한 기고문입니다.[네피셜] 시리즈는 작성자 개인이 네이버에서 일하면서 느끼는 경험과 이에 대한 생각을 정리한 기고문입니다.